4D-челночные системы для перемещения тяжелых грузов
Описание
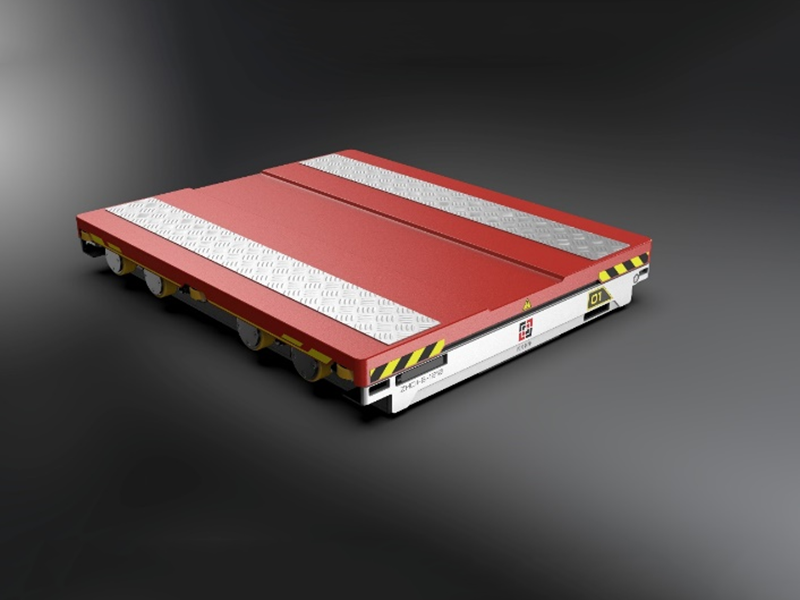
4D-шаттл, являющийся основным оборудованием интеллектуальной системы плотного хранения, состоит в основном из каркаса, электрической системы, системы электропитания, системы привода, подъемной системы, сенсорной системы и т. д. Он имеет пять режимов работы: дистанционное управление, ручной, полуавтоматический, локальный автоматический и онлайн-автоматический. Он оснащен многоуровневой системой защиты и оповещения о безопасности, региональной сигнализацией, оперативной сигнализацией и интерактивной сигнализацией. Корпуса соединены газозащитной сваркой и высокопрочными болтами. Каркас имеет двухслойную конструкцию. Все детали окрашены методом распыления, а обработанные детали и электрические кронштейны покрыты гальваническим покрытием. Он имеет два комплекта приводных систем и два комплекта подъемных систем. Приводные системы отвечают за движение по осям XY. Одна из подъемных систем отвечает за подъем грузов, а другая — за переключение между основной и второстепенной полосами. Изменение высоты по оси Z позволяет осуществлять перемещение 4D-шаттла между ярусами с помощью специально разработанного лифта, что обеспечивает функцию доступа в трехмерное пространство.
Конструкция тяжеловесного варианта в основном идентична стандартной версии. Главное отличие заключается в значительном увеличении грузоподъемности, которая почти вдвое превышает грузоподъемность стандартной версии. Усилена несущая конструкция подъемного механизма, увеличена мощность подъемного двигателя, что позволяет достичь грузоподъемности в 2,5 тонны. Мощность двигателя перемещения осталась неизменной. Для увеличения выходной мощности увеличено передаточное число, а скорость движения 4D-челнока соответственно снижена.
стандартный бизнес
Комплектация и размещение товара на складе.
Уровень изменения стоимости перемещения и учета запасов
Технические параметры
| проект | Основные данные | Примечание | |
| модель | SX-ZHC-T-1210-2T | ||
| Применимый лоток | Ширина: 1200 мм Глубина: 1000 мм | ||
| Максимальная нагрузка | Максимальная грузоподъемность 25 000 кг | ||
| рост/вес | Высота корпуса: 150 мм, вес челнока: 350 кг. | ||
| Пешком в основном направлении X | скорость | Максимальная скорость холостого хода: 1,5 м/с, максимальная скорость при полной нагрузке: 1,0 м/с | |
| ускорение при ходьбе | ≤ 1,0 м/с2 | ||
| мотор | Бесщеточный серводвигатель 48 В постоянного тока 1500 Вт | Импортный сервопривод | |
| драйвер сервера | Драйвер бесщеточного сервопривода | Импортный сервопривод | |
| Идите в направлении буквы Y. | скорость | Максимальная скорость холостого хода: 1,0 м/с, максимальная скорость при полной нагрузке: 0,8 м/с | |
| ускорение при ходьбе | ≤ 0,6 м/с2 | ||
| мотор | Бесщеточный сервомотор 48 В постоянного тока 1500 Вт | Импортный сервопривод | |
| драйвер сервера | Драйвер бесщеточного сервопривода | Импортный сервопривод | |
| угон груза | высота домкрата | 30 мм _ | |
| мотор | Бесщеточный двигатель 48 В постоянного тока 75 Вт | Импортный сервопривод | |
| главный домкрат | высота домкрата | 35 мм | |
| мотор | Бесщеточный двигатель 48 В постоянного тока 75 Вт | Импортный сервопривод | |
| Основной канал/метод позиционирования | Позиционирование при ходьбе: позиционирование по штрихкоду / лазерное позиционирование | Германия P+F/SICK | |
| Вторичный канал/метод позиционирования | Определение местоположения при ходьбе: фотоэлектрический датчик + энкодер | Германия P+F/SICK | |
| Позиционирование лотка: лазер + фотоэлектрический датчик | Германия P+F/SICK | ||
| Система управления | Программируемый контроллер ПЛК S7-1200 | Германия СИМЕНС | |
| пульт дистанционного управления | Рабочая частота 433 МГц, дальность связи не менее 100 метров. | Импортируйте персонализированные товары. | |
| Источник питания | литиевая батарея | Высокое качество отечественного производства | |
| Параметры батареи | 48 В, 30 Ач, время работы ≥ 6 ч, время зарядки 3 ч, количество циклов перезарядки: 1000 раз | Вместимость может варьироваться в зависимости от размера транспортного средства. | |
| метод регулирования скорости | Сервоуправление, низкоскоростное управление с постоянным крутящим моментом | ||
| метод управления перекладиной | Система планирования WCS, управление с помощью сенсорного компьютера, дистанционное управление. | ||
| уровень рабочего шума | ≤60 дБ | ||
| Требования к покраске | Багажник в сборе (черный), верхняя крышка красная, передняя и задняя алюминиевые панели белые. | ||
| температура окружающей среды | Температура: 0–50 ℃. Влажность: 5–95% (без конденсации). | ||



