Информация о 4D челночной конвейерной системе





цепной конвейер
| проект | Основные данные | Примечание |
| модель | SX-LTJ-1.0T -600H | |
| Моторный редуктор | ШИТЬ | |
| тип структуры | Каркас изготовлен из алюминиевого сплава, а ножки и опоры — из углеродистой стали. | |
| метод управления | Ручное/автономное/онлайн/автоматическое управление | |
| меры безопасности | Электрическая блокировка, защитные направляющие с обеих сторон. | |
| принять стандарт | JB/T7013-93 | |
| полезная нагрузка | Максимальная нагрузка 1000 кг | |
| досмотр груза | Фотоэлектрические датчики | БОЛЬНОЙ/P+F |
| цепной путь | Нейлоновая направляющая с низким коэффициентом трения | |
| конвейерная цепь | Цепь Дунхуа | |
| несущий | Fukuyama Hardware, герметичные шарикоподшипники | |
| скорость передачи | 12 м/мин | |
| Обработка и покрытие поверхностей | Травление, фосфатирование, опрыскивание | |
| контроль шума | ≤73 дБ | |
| поверхностное покрытие | компьютер серый | Прикрепленные образцы |
Структура оборудования
Конвейер состоит из рамы, опор, приводного механизма и т. д. Рама изготовлена из алюминиевого сплава, на обоих концах установлены беззубые реверсивные колеса. Конвейерная цепь представляет собой прямую двухрядную цепь с шагом P = 15,875 мм. Опора цепи изготовлена из высокомолекулярного полиэтилена (СВМПЭ) с самосмазывающимся эффектом. Сварные опоры соединены с основной рамой болтами с прижимной пластиной, винтовые регулировочные ножки M20 соединены с землей, а высота конвейерной поверхности может регулироваться на +25 мм. Приводной механизм состоит из встроенного двигателя замедления в середине, вала привода, комплекта звездочек, опоры двигателя и устройства натяжения цепи, а винтовой регулировочный шкив натягивает конвейерную цепь.
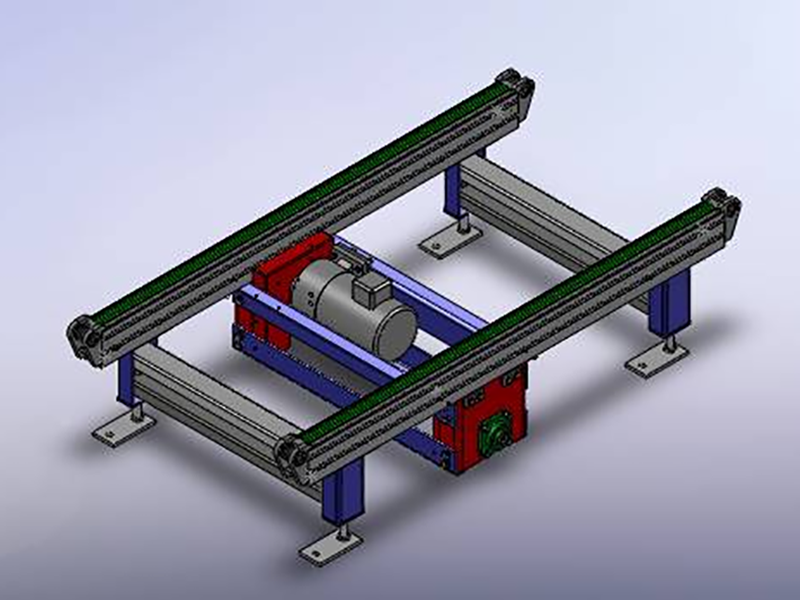
Принцип работы:
Двигатель приводит в движение карданный вал через трансмиссионную группу, а карданный вал приводит в движение конвейерную цепь, обеспечивая функцию транспортировки поддона.
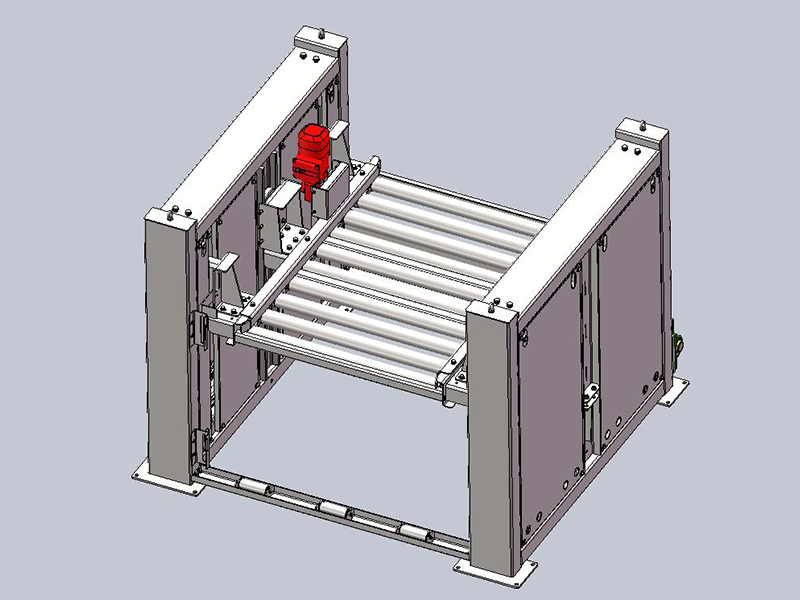
Роликовый конвейер
| Элемент | Основные данные | Примечания |
| Модель | SX-GTJ-1.0T -600H | стальная конструкция |
| Моторный редуктор | ШИТЬ | |
| тип структуры | изгиб углеродистой стали | |
| метод управления | Ручное/автономное/онлайн/автоматическое управление | |
| полезная нагрузка | Максимальная нагрузка 1000 кг | |
| скорость передачи | 12 м/мин | |
| ролик | 76 двойной цепной ролик | |
| приводная цепь | Завод цепей Хуадун | |
| несущий | ось Ха | |
| Обработка и покрытие поверхностей | Травление, фосфатирование, опрыскивание | |
Структура оборудования
Конструкция оборудования: Роликовый конвейер состоит из рамы, опор, роликов, приводов и других узлов. Ролики: φ76x3, односторонние, с двумя звездочками, оцинкованные, расстояние между роликами P=174,5 мм, односторонние, с двумя звездочками. Приваренные опоры соединены с основной рамой болтами и прижимной пластиной, регулировочные ножки с винтовым креплением M20 соединены с землей, высота конвейерной поверхности может регулироваться на +25 мм. Приводное устройство состоит из встроенного тормозного двигателя в середине, комплекта ведущей звездочки, опоры двигателя и устройства натяжения цепи.
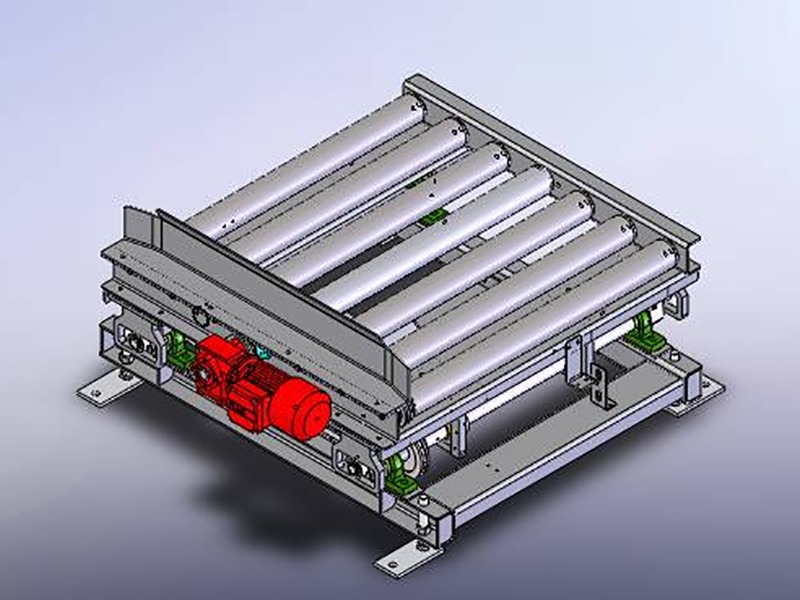
Принцип работы: двигатель приводит в движение ролик через цепь, а ролик передается на соседний ролик через другую цепь, а затем на следующий ролик, обеспечивая конвейерную функцию.
Подъемно-транспортная машина
| проект | Основные данные | Примечание |
| модель | SX-YZJ-1.0T-6 0 0H | стальная конструкция |
| Моторный редуктор | ШИТЬ | |
| тип структуры | изгиб углеродистой стали | |
| метод управления | Ручное/автономное/онлайн/автоматическое управление | |
| меры безопасности | Электрическая блокировка, защитные направляющие с обеих сторон. | |
| Стандарт | JB/T7013-93 | |
| полезная нагрузка | Максимальная нагрузка 1000 кг | |
| досмотр груза | Фотоэлектрические датчики | БОЛЬНОЙ/P+F |
| ролик | 76 двойной цепной ролик | |
| Подшипники и корпуса | Подшипник: вал из Харбина; посадочное место подшипника: Фушань ФСБ. | |
| скорость передачи | 12 м/мин | |
| Обработка и покрытие поверхностей | Травление, фосфатирование, опрыскивание | |
| контроль шума | ≤73 дБ | |
| поверхностное покрытие | компьютер серый | Прикрепленные образцы |
Структура оборудования
Конструкция оборудования: Роликовый конвейерный станок состоит из конвейерных элементов, подъемных механизмов, направляющих компонентов и других узлов. Регулировка высоты конвейерной поверхности +25 мм. Подъемный механизм работает по принципу кривошипно-шатунного привода с электродвигателем, а приводное устройство состоит из встроенного редуктора в середине, комплекта звездочек, опоры двигателя и устройства натяжения цепи.
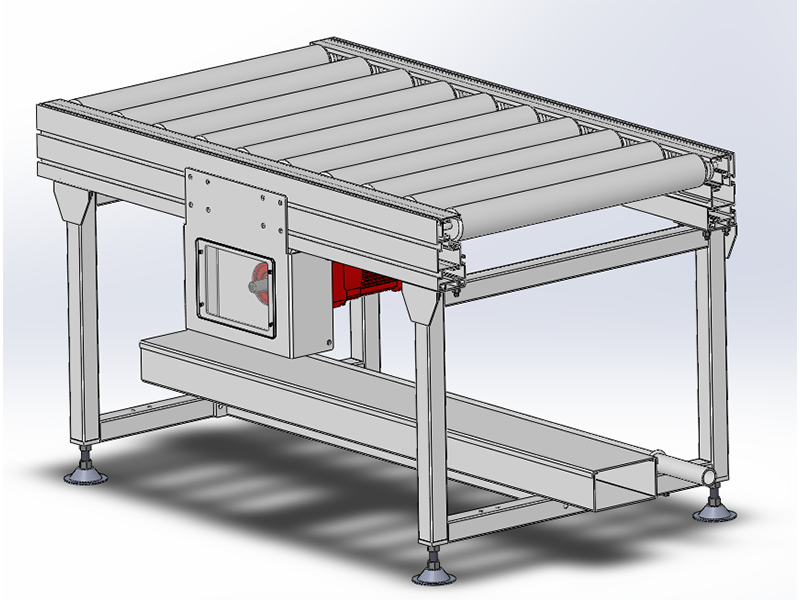
Принцип работы: Когда поддон перемещается к оборудованию с помощью соответствующего конвейера, двигатель подъемного механизма вращается, приводя в движение кулачковый механизм для подъема поддона, и останавливается, когда поддон находится на месте; двигатель конвейера запускается, перемещая поддон к погрузочному оборудованию, затем двигатель останавливается, двигатель подъемного механизма вращается, и кулачковый механизм приводит в движение оборудование для опускания, и когда поддон находится на месте, двигатель подъемного механизма останавливается, завершая рабочий цикл.
Переходной конвейер
| 1) проект | Основные данные | Примечание |
| модель | SX-GDLTJ-1.0T-500H-1.6L | |
| Моторный редуктор | ШИТЬ | |
| тип структуры | Ножки и гнутая углеродистая сталь | |
| метод управления | Ручное/автономное/онлайн/автоматическое управление | |
| меры безопасности | Электрическая блокировка, защитные направляющие с обеих сторон. | |
| Стандарт | JB/T7013-93 | |
| полезная нагрузка | Максимальная нагрузка 1000 кг | |
| досмотр груза | Фотоэлектрические датчики | БОЛЬНОЙ/P+F |
| цепной путь | Нейлоновая направляющая с низким коэффициентом трения | |
| конвейерная цепь | Цепь Дунхуа | |
| Подшипники и корпуса | Подшипник: вал производства Харбина, посадочное место подшипника: Фукуяма FSB. | |
| скорость передачи | 12 м/мин | |
| Обработка и покрытие поверхностей | Травление, фосфатирование, опрыскивание | |
| контроль шума | ≤73 дБ | |
| поверхностное покрытие | компьютер серый | Прикрепленные образцы |
Структура оборудования
Конструкция оборудования: Данное оборудование используется в месте соединения подъемника и стеллажа, а конвейер состоит из рамы, опор и приводного блока. Конвейерная цепь представляет собой прямую двухрядную цепь с шагом P = 15,875 мм. Опора цепи изготовлена из высокомолекулярного полиэтилена (СВМПЭ) с самосмазывающимся эффектом. Приваренные опоры соединяются с корпусом стеллажа. Приводное устройство состоит из встроенного в середине двигателя замедления, вала привода, комплекта звездочек, опоры двигателя и устройства натяжения цепи, а натяжение конвейерной цепи осуществляется с помощью винтового регулировочного шкива.
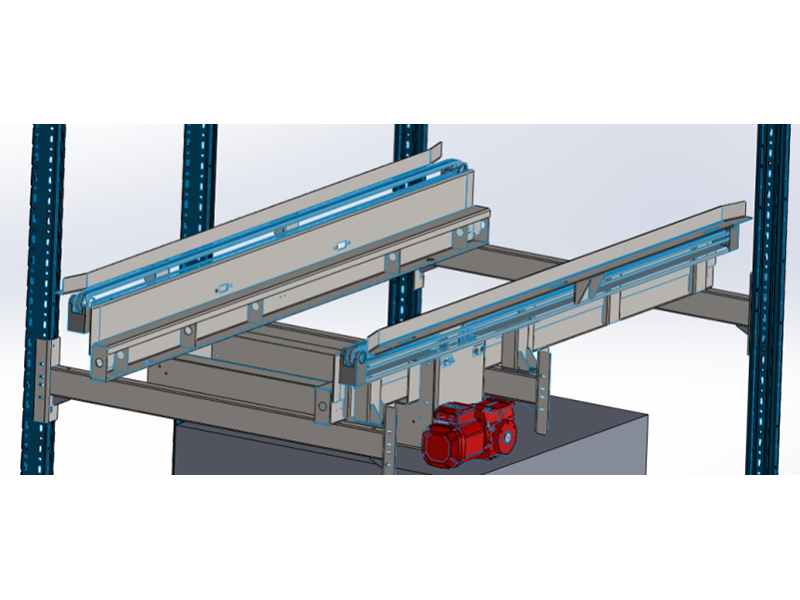
Принцип работы: двигатель приводит в движение приводной вал через трансмиссионную группу, а приводной вал приводит в движение конвейерную цепь, обеспечивая функцию транспортировки поддона.
лифт этажа
| проект | Основные данные | Примечание |
| модель | LDTSJ-1.0T-700H | стальная конструкция |
| Моторный редуктор | ШИТЬ | |
| тип структуры | Колонна: гнутая углеродистая сталь. Внешняя сторона: уплотнение из стальной пластины. | |
| метод управления | Ручное/автономное/онлайн/автоматическое управление | |
| меры безопасности | Электрическая блокировка, устройство защиты от падения | |
| Стандарт | JB/T7013-93 | |
| полезная нагрузка | Максимальная нагрузка 1000 кг | |
| досмотр груза | Фотоэлектрические датчики | БОЛЬНОЙ/P+F |
| ролик | 76 двойной цепной ролик | |
| подъемная цепь | Цепь Дунхуа | |
| несущий | Подшипники общего назначения: шпоночные подшипники вала Harbin: NSK | |
| скорость бега | Скорость конвейера: 16 м/мин, скорость подъема: 6 м/мин. | |
| Обработка и покрытие поверхностей | Травление, фосфатирование, опрыскивание | |
| контроль шума | ≤73 дБ | |
| поверхностное покрытие | компьютер серый | Прикрепленные образцы |
основная структура и особенности
Каркас: в качестве колонны используется гнутая пластина из углеродистой стали толщиной 5 мм, а снаружи она герметизирована стальной пластиной;
Подъемная часть:
На верхней части подъемника установлена подъемная рама, изготовленная из углеродистой стали, а подъемный двигатель приводит в движение подъемный зубчатый механизм через цепь.
Погрузочная платформа:
Изготовлена из углеродистой стали. Погрузочная платформа оборудована стандартным конвейером.
Принцип работы:
Подъемный двигатель приводит в движение погрузочную платформу для выполнения подъемных работ; конвейер на погрузочной платформе обеспечивает плавный вход и выход грузов из лифта.



